PIC32-Tutorial - Teil 1: Einstieg und Peripherie -
Hardware, IDE und Einstieg
Mir ist mittlerweile aufgefallen, dass sich der Peripherie-Takt beim Mini-32 anscheinend nicht ändern lässt!Dieser läuft bei mir immer mit 80MHz, egal welcher Teiler eingestellt wurde.
Moderne µC sind immer häufiger nur als SMD-Bauform erhältlich (in der PIC32-Familie gibt es allerdings auch noch einige Ausnahmen in DIP-Gehäuse).
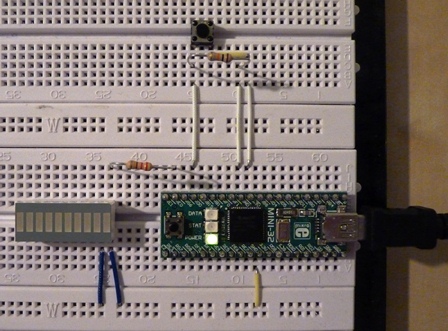
Dies erschwert einen schnellen Testaufbau auf Lochrasterplatine oder Steckbrett. Für dieses Tutorial verwende ich das Mini-32-Board von MikroElektronika.
Es besitzt die Abmessungen eines DIP26-Gehäuses und auf dem Board ist nicht nur der PIC32MX534F064H-Controller, sondern auch die zum Betrieb unbedingt notwendige Grundausstattung an Periperiebeschaltung (Quarz, Kondensatoren, Reset-Taster, etc.) unter gebracht.
Desweiteren gibt es auch noch eine Mini-USB-Buchse über die mittels eines Bootloaders die Software auf den µC übertragen wird. Somit enfällt für den Einstieg auch die Anschaffung eines Programmiergeräts. Die wenigen externen Bauteile,
die in diesem Tutorial zu Anfang benötigt werden, können bequem zusammen mit dem Mini-32 auf einem Steckbrett untergebracht werden. Es kann natürlich auch ein anderes PIC32-Board verwendet werden. Als Entwicklungsumgebung für die Beispiele auf dieser Seite verwende ich MPLAB 8 IDE mit dem C32-Plugin als C-Compiler.
Um ein neues Projekt anzulegen, verwendet man den "Project Wizard...". Dieser findet sich unter dem Reiter "Project".
Im "Project Wizard" wählt man dann zunächst aus einer Liste ("select a device") den gewünschten PIC-µC aus (in unserem Fall PIC32MX534F064H) und anschließend die Sprache und den Compiler.
Anschließend gibt man dem Projekt einen Namen und wählt den gewünschten Speicherort aus. Danach kann man noch bereits existierende Dateien zum Projekt hinzufügen und das neue Projekt erstellen.
Jetzt fehlt noch eine .c-Datei in die man den Programmcode schreiben kann. Dafür klickt man unter "File" auf "New" und speichert die neue Textdatei als z.B. main.c im Projektordner ab.
Dann bindet man sie ins Projekt ein, indem man mit Rechts auf "Source Files" klickt und anschließend auf "Add Files...". Im sich öffnenden Fenster muss man dann nur noch die Datei main.c auswählen und fertig ist das neue Projekt.
Hinweis: Mittlerweile (Stand: März 2013) verwende ich als IDE MPLAB X, weiterhin mit C32 als Compiler.
Jetzt kann es auch schon mit dem Programmieren los gehen. Als Erstes will ich kurz das Grundgerüst erläutern, aus dem eigentlich jedes Programm besteht.
1//Header-Dateien einbinden 2#include<p32xxxx.h>// einbinden der Header-Datei um die Chiptypischen Bezeichnungen für Register und Ports verwenden zu können 3#include<plib.h>// Header-Datei mit Funktion für die µC-Peripherie 4//Konfigurationseinstellungen 5#pragma config FSOSCEN = OFF // Disable secondary oscillator 6#pragma config POSCMOD=HS // High speed crystal mode 7#pragma config FNOSC=PRIPLL // Use Primary Oscillator with PLL (XT, HS, or EC) 8#pragma config FPLLIDIV = DIV_2 // Divide 8MHz to between 4-5MHz before PLL (now 4MHz) 9#pragma config FPLLMUL=MUL_20 // Multiply with PLL (now 80MHz)10#pragma config FPLLODIV=DIV_1 // Teilt durch 111#pragma config FWDTEN = OFF // Disable watchdog timer1213#define SYSCLK 80000000L // SYSCLK kann jetzt synonym für 80MHz verwendet werden -> wird von einigen Funktion benötigt 1415int main(void) // Hauptprogramm16 {
17// Initialisierung18 SYSTEMConfigPerformance(SYSCLK); // für maximale Performence1920while(1) // Endlosschleife für eigentliches Programm21 {
22 ...code...
23 }
24return 1;
25 }
Zuerst kommen die Include-Anweisungen, mit denen die Header-Dateien eingebunden werden. Mittels "#pragma config" wird anschließend der µC konfiguriert.
Eine Liste von config-Anweisungen findet sich in der Hilfsfunktion der MLAB-IDE. Die Hauptfunktion main() setzt sich dann aus zwei Teilen zusammen. Als Erstes die Intialisierung:
Diese wird nach dem Reset nur einmal durchlaufen, weshalb man hier die Hardware/Peripherie (Timer, ADC, Schnittstellen, Interruptverhalten) des µC initialisiert bzw.
in ihren Startzustand versetzt oder auch Variablen deklariert und initialisiert. Zweiter Bestandteil der Main-Funktion ist eine Endlosschleife. In ihr arbeitet
der µC das eigentliche Hauptprogramm ab.
"Hello World!"
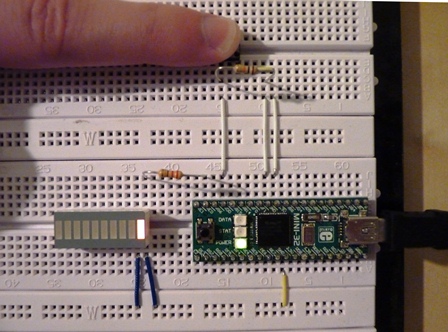
Als erste Programm soll eine Taste abgefragt werden. Der Zustand der Taste
soll über eine LED ausgegeben werden.
1#include<p32xxxx.h>// include chip specific header file 2#include<plib.h>// include peripheral library functions 3//Konfigurationseinstellungen 4#pragma config FSOSCEN = OFF // Disable secondary oscillator 5#pragma config POSCMOD=HS // High speed crystal mode 6#pragma config FNOSC=PRIPLL // Use Primary Oscillator with PLL (XT, HS, or EC) 7#pragma config FPLLIDIV = DIV_2 // Divide 8MHz to between 4-5MHz before PLL (now 4MHz) 8#pragma config FPLLMUL=MUL_20 // Multiply with PLL (now 80MHz) 9#pragma config FPLLODIV=DIV_1 // Teilt durch 110#pragma config FWDTEN = OFF // Disable watchdog timer1112#define SYSCLK 80000000L
1314int main(void)
15 {
16 SYSTEMConfigPerformance(SYSCLK); //für maximale Performence1718 TRISDbits.TRISD0 = 1; // RD0 -> Eingang19 TRISEbits.TRISE0 = 0; // RE0 -> Ausgang202122while(1) //Taster in Endlosschleife pollen um LED ein/auszuschalten23 {
24if(PORTDbits.RD0==1) //Taster betätigt?25 {
26 LATEbits.LATE0 = 1; //ja -> LED an27 }
28else29 {
30 LATEbits.LATE0 = 0; //nein -> LED aus31 }
32 }
33return 1;
34 }
Das Ergebnis ist nicht besonderst spektakulär. Drückt man die Taste geht die LED an, lässt man sie wieder los geht die LED aus. Dafür hätte man noch keinen µC gebraucht.
Deshalb ändern wir das Programm jetzt so ab, dass die LED bei jedem Tastendruck getoggelt wird. Der Programm-Code sieht dann so aus:
1#include<p32xxxx.h>// include chip specific header file 2#include<plib.h>// include peripheral library functions 3//Konfigurationseinstellungen 4#pragma config FSOSCEN = OFF // Disable secondary oscillator 5#pragma config POSCMOD=HS // High speed crystal mode 6#pragma config FNOSC=PRIPLL // Use Primary Oscillator with PLL (XT, HS, or EC) 7#pragma config FPLLIDIV = DIV_2 // Divide 8MHz to between 4-5MHz before PLL (now 4MHz) 8#pragma config FPLLMUL=MUL_20 // Multiply with PLL (now 80MHz) 9#pragma config FPLLODIV=DIV_1 // Teilt durch 110#pragma config FWDTEN = OFF // Disable watchdog timer1112#define SYSCLK 80000000L
1314int main(void)
15 {
16 SYSTEMConfigPerformance(SYSCLK); //für maximale Performence1718 TRISDbits.TRISD0 = 1; // RD0 -> Eingang19 TRISEbits.TRISE0 = 0; // RE0 -> Ausgang202122while(1) //Taster in Endlosschleife pollen um LED ein/auszuschalten23 {
24if(PORTDbits.RD0==1) //Taster betätigt?25 {
26 LATEbits.LATE0 = !LATEbits.LATE0; //ja -> LED toggeln27 }
28 }
29return 1;
30 }
Allerdings funktioniert das Programm auf dem µC noch nicht so wie gedacht. Manchmal reagiert die LED auf den Tastendruck wie gewünscht. Manchmal behält sie aber nach kurzem Zucken ihren Zustand.
Grund dafür ist, dass der Taster in der while-Schleife sehr schnell hinter einander abgefragt wird. Somit wird die LED bei einmal drücken mehrmals getoggelt, da die Abfrage schneller wiederholt wird, als man los lassen kann.
Damit das Programm richtig funktioniert müssen wir also dem Bediener Zeit lassen, die Taste los zu lassen. Nach dem Betätigen soll der Taster erst wieder abgefragt werden, wenn eine gewisse Zeit vergangen ist.
Wir brauchen also eine Warteschleife. Diese soll mit einem Timer realisiert werden.
Timer
Wir schreiben uns jetzt also eine Funktion void wait(void). Doch zuerst muss der Timer konfiguriert werden, weshalb wir auch noch eine Funktion void config_timer(void) benötigen.
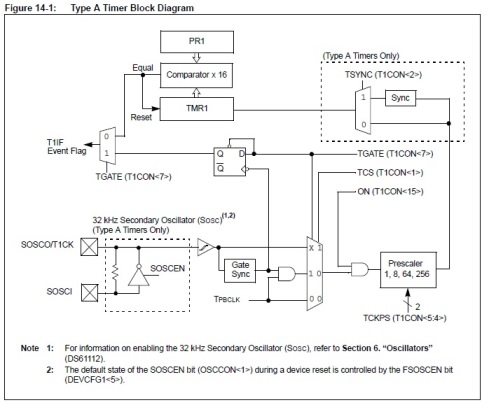
Die notwendigen Informationen finden wir im Datenblatt unseres µCs und in der Timer-Application-Note von Microchip.
Verwendet werden soll Timer1. Die Taste soll ungefähr 200ms lang nicht abgefragt werden. Das sollte locker ausreichen, um mit einem kurzen Drücken die LED sicher umzuschalten. Im Bild links kann man das Blockschaltbild des Timer1 sehen.
Man kann ihn aus unterschiedlichen Taktquellen speisen. Wir nehmen für dieses Programm den Peripheral-Takt. Dieser wird vom µC-Takt abgleitet. Über eine "#pragma config"-Anweisung lässt sich dessen Vorteiler einstellen.
1#include<p32xxxx.h>// include chip specific header file 2#include<plib.h>// include peripheral library functions 3//Konfigurationseinstellungen 4#pragma config FSOSCEN = OFF // Disable secondary oscillator 5#pragma config POSCMOD=HS // High speed crystal mode 6#pragma config FNOSC=PRIPLL // Use Primary Oscillator with PLL (XT, HS, or EC) 7#pragma config FPLLIDIV = DIV_2 // Divide 8MHz to between 4-5MHz before PLL (now 4MHz) 8#pragma config FPLLMUL=MUL_20 // Multiply with PLL (now 80MHz) 9#pragma config FPLLODIV=DIV_1 // Teilt durch 110#pragma config FWDTEN = OFF // Disable watchdog timer11#pragma config FPBDIV = DIV_1 // stellt den Peripheral-Clock-Divisor auf 1:1 ein1213#define SYSCLK 80000000L
1415void config_timer(void)
16 {
17 T1CON = 0x00; // hält Timer1 an und setzt setzt alle Einstellungen zurück -> PBCLK als Taktquelle18 T1CONbits.TCKPS = 0b11; // Timer1 Vorteiler auf 1:256 eingestellt. -> Takt für Timer ca 312,5kHz19 TMR1 = 0x00; // Timer1-Register auf Startwert setzen -> Überlauf nach ca. 200ms20 PR1 = 0xFFFF; // Period-Register laden21return;
22 }
23void wait(void)
24 {
25 T1CONbits.ON = 1; // startet Timer126while(IFS0bits.T1IF!=1); // pollen des Timer-Interruptflags -> zeigt an wenn Timer1 überläuft27 T1CONbits.ON = 0; // nach Überlauf -> Timer1 anhalten...28 IFS0bits.T1IF = 0; // ...und Interruptflag zurück setzen29 TMR1 = 0x00; // Startwert für den nächsten Durchlauf wieder laden30return;
31 }
3233int main(void)
34 {
35 SYSTEMConfigPerformance(SYSCLK); //für maximale Performence3637 TRISDbits.TRISD0 = 1; // RD0 -> Eingang38 TRISEbits.TRISE0 = 0; // RE0 -> Ausgang3940 config_timer();
4142while(1) //Taster in Endlosschleife pollen um LED ein/auszuschalten43 {
44if(PORTDbits.RD0==1) //Taster betätigt?45 {
46 LATEbits.LATE0 = ~LATEbits.LATE0; //ja -> LED toggeln47 wait(); // Warteschleife aufrufen48 }
49 }
50return 1;
51 }
52
Jetzt funktioniert das Toggeln der LED wie gedacht. Allerdings vertrötteln wir im Moment noch einen Haufen Zeit in der Warteschleife und beim Pollen der Taste.
Da gibt es aber auch einen eleganteren Weg.
Interrupt
Da man aber im seltesten Fall nur eine Taste abfragen möchte, ist das Pollen einer Taste eine sehr ungeschickte Lösung. Besser ist es auf den Tastendruck mit einem Interrupt zu reagieren.
Interrupts unterbrechen das laufende Programm um auf ein bestimmtes Ereignis zu reagieren (Überlauf des Timers, Pegelwechsel an Pin, AD-Wandler beendet Wandlung, etc.) und kehren nach der Reaktion
(die z.B. im Abarbeiten eines kurzen Unterprogramms besteht) wieder an die Stelle im Hauptprogramm zurück, wo der µC zu letzt war. Im Programm unten verwende ich als Interruptquelle den externen Interrupt0 (INT0), um auf
einen Tastendruck zu reagieren. Dafür muss die Taste an Pin RD0 angeschlossen sein (ist sie auch in der vorherigen Programmen gewesen). Das x++ in der Endlosschleife im Hauptprogramm symbolisiert irgend einen Prozess,
der ständig abgearbeitet werden soll und nur kurz für die Reaktion auf den Tastendruck unterbrochen werden soll. Die für die Konfiguration einer ISR (Interrupt-Service Routine) notwendingen Informationen findet man im
"Section 8: Interrupt"-Datenblatt der PIC32-Familie. Informationen zur Verwendung von Interrupts in C findet man im
C32 users guide von Microchip.
1#include<p32xxxx.h>// include chip specific header file 2#include<plib.h>// include peripheral library functions 3//Konfigurationseinstellungen 4#pragma config FSOSCEN = OFF // Disable secondary oscillator 5#pragma config POSCMOD=HS // High speed crystal mode 6#pragma config FNOSC=PRIPLL // Use Primary Oscillator with PLL (XT, HS, or EC) 7#pragma config FPLLIDIV = DIV_2 // Divide 8MHz to between 4-5MHz before PLL (now 4MHz) 8#pragma config FPLLMUL=MUL_20 // Multiply with PLL (now 80MHz) 9#pragma config FPLLODIV=DIV_1 // Teilt durch 110#pragma config FWDTEN = OFF // Disable watchdog timer11#pragma config FPBDIV = DIV_1 // stellt den Peripheral-Clock-Divisor auf 1:1 ein121314#define SYSCLK 80000000L
1516// External Interrupt 0 Service Routine -> PIN RD01718void config_timer(void)
19 {
20 T1CON = 0x00; // hält Timer1 an und setzt setzt alle Einstellungen zurück -> PBCLK als Taktquelle21 T1CONbits.TCKPS = 0b11; // Timer1 Vorteiler auf 1:256 eingestellt. -> Takt für Timer ca 312,5kHz22 TMR1 = 0x00; // Timer1-Register auf Startwert setzen -> Überlauf nach ca. 200ms23 PR1 = 0xFFFF; // Period-Register laden24return;
25 }
26void wait(void)
27 {
28 T1CONbits.ON = 1; // startet Timer129while(IFS0bits.T1IF!=1); // pollen des Timer-Interruptflags -> zeigt an wenn Timer1 überläuft30 T1CONbits.ON = 0; // nach Überlauf -> Timer1 anhalten...31 IFS0bits.T1IF = 0; // ...und Interruptflag zurück setzen32 TMR1 = 0x00; // Startwert für den nächsten Durchlauf wieder laden33return;
34 }
3536int main(void)
37 {
38 SYSTEMConfigPerformance(SYSCLK);// für maximale Performence3940 TRISDbits.TRISD0 = 1; // RD0 -> Eingang41 TRISEbits.TRISE0 = 0; // RE0 -> Ausgang4243 INTEnableSystemMultiVectoredInt();
44//config für Interrupt45 IEC0bits.INT0IE = 0; // Interrupt disabel46 IFS0bits.INT0IF = 0; // Flag für INT0 löschen47 INTCONbits.INT0EP = 1; // Interrupt bei steigender Flanke an Pin RD048 IPC0 = 0x1C000000; // IP03 = 0b111 -> Priorität = 749 IEC0bits.INT0IE = 1; // Interrupt freigeben50 config_timer();
51int x=0;
52while(1) // Taster in Endlosschleife pollen um LED ein/auszuschalten53 {
54/*Hier steht dann irgendein Vorgang, der in55 der interruptfreien Zeit abgearbeitet wird*/56 x++; //z.B. x immer um 1 erhöhen57 }
58return 1;
59 }
6061//Interrupt Service Routine62void __ISR(3, ipl7) INT0IntHandler(void)
63 {
64 LATEbits.LATE0 = ~LATEbits.LATE0; // LED toggeln65 wait(); // Warteschleife aufrufen66 IFS0bits.INT0IF = 0; // Flag muss wieder gelöscht werden67 }
68
Zwar müssen wir jetzt nicht mehr ständig die Taste pollen, aber nach einen Tastendruck hängen wir (für µC-Verhältnisse) immer noch eine halbe Ewigkeit
in der Warteschleife fest. Also ersetzen wir diese auch noch durch einen Interrupt. Zur Konfiguration der beiden Interruptquellen greifen wir ab jetzt auf
die Funktionen der Peripheral-Libary zurück.
Das macht das Programm übersichtlicher und erspart uns Arbeit.
1#include<p32xxxx.h>// hier wird die µC spezifische Header-Datei eingebunden 2#include<plib.h>// include peripheral library functions 3//Konfigurationseinstellungen 4#pragma config FSOSCEN = OFF // Disable secondary oscillator 5#pragma config POSCMOD = HS // High speed crystal mode 6#pragma config FNOSC = PRIPLL // Use Primary Oscillator with PLL (XT, HS, or EC) 7#pragma config FPLLIDIV = DIV_2 // Divide 8MHz to between 4-5MHz before PLL (now 4MHz) 8#pragma config FPLLMUL=MUL_20 // Multiply with PLL (now 80MHz) 9#pragma config FPLLODIV = DIV_1 // Sysclk = 80MHz10#pragma config FWDTEN = OFF // Disable watchdog timer11#pragma config FPBDIV = DIV_1 // stellt den Peripheral-Clock-Divisor auf 1:1 ein121314#define SYSCLK 80000000L
15161718void config_timer(void)
19 {
20 T1CON = 0x00; // hält Timer1 an und setzt setzt alle Einstellungen zurück -> PBCLK als Taktquelle21 T1CONbits.TCKPS = 0b11; // Timer1 Vorteiler auf 1:256 eingestellt22 TMR1 = 0x00; // Timer1-Register auf Startwert setzen23 PR1 = 0xFFFF; // Period-Register laden24return;
25 }
26int main(void)
27 {
28 SYSTEMConfigPerformance(SYSCLK); // für maximale Performence2930 TRISDbits.TRISD0 = 1; // RD0 -> Eingang31 TRISEbits.TRISE0 = 0; // RE0 -> Ausgang32 TRISEbits.TRISE1 = 0;
33 TRISEbits.TRISE2 = 0;
34 LATE = 0x00;
353637//config für Interrupt38 INTEnableSystemMultiVectoredInt(); // ermöglicht Multi-Vector Interrupts39 INTDisableInterrupts(); // alle Interrupts sperren40 INTEnable(INT_INT0,1); // ext. Interrupt erlauben41 INTSetPriority(INT_INT0,7); // ext. Interrupt-Priorität setzen42 INTEnable(INT_T1,1); // Timer1-Interrupt erlauben43 INTSetPriority(INT_T1,6); // Timer1-Interrupt-Prioritär setzen44 INTClearFlag(INT_INT0); // zur Sicherheit die Interrupt-Flags zurücksetzen45 INTClearFlag(INT_T1);
46 config_timer(); // Timer1 konfigurieren47 INTEnableInterrupts(); // gibt allgemein Interrupts frei484950int x=0;
51while(1)
52 {
53/*Hier steht dann irgendein Vorgang, der in 54der interruptfreien Zeit abgearbeitet wird*/5556 x++; //z.B. x immer um 1 erhöhen57 }
58return 1;
59 }
60// Interrupt Service Routine für INT061void __ISR(3, ipl7) INT0IntHandler(void)
62 {
63 LATEbits.LATE0 = ~LATEbits.LATE0; // LED toggeln64 INTEnable(INT_INT0,0); // ext. Interrupt sperren65 T1CONbits.ON = 1; // startet Timer166return;
67 }
68// Interrupt Service Routine für INT069void __ISR(4, ipl6) Timer1IntHandler(void)
70 {
71 LATEbits.LATE1= ~LATEbits.LATE1; // Breakpoint-Ersatz zum debuggen ;-)72 T1CONbits.ON = 0; // Timer1 anhalten73 INTClearFlag(INT_T1); // Timer1-Interrupt-Flag zurücksetzen74 INTClearFlag(INT_INT0); // Interrupt-Flag zurücksetzen75 INTEnable(INT_INT0,1); // ext. Interrupts wieder erlauben76 TMR1 = 0x00; // Startwert für den nächsten Durchlauf wieder laden77return;
78 }
Kleiner Tipp noch wenn das Programm nicht auf Anhieb läuft und man keinen In-System-Debugger hat. Man kann anstatt Breakpoints zu setzen Portpins an bestimmten Programmstellen
auf High oder Low setzen. Mittels LEDs lässt sich dann das Vorankommen des Programms beobachten.
AD-Wandler
Als nächstes verwenden wir den Analog-Digital-Wandler (ADC). Unser PIC32 enthält einen 10Bit-Wandler mit einer maximalen Abtastrate von 1Msps (Megasample per second), der mit
Sukzessiver Approximation arbeitet.
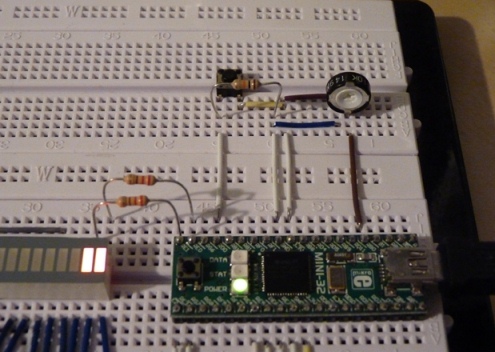
Um verschiedene Spannungen an den ADC-Eingang anlegen zu können, um damit unser Program zu testen, brauchen wir noch ein Potentiometer, das wir zwischen Masse und +3,3V schalten.
Im ersten Beispiel verzichten wir wieder auf die Verwendung von fertigen Funktionen und nehmen alle Einstellungen selbst "von Hand" vor. Es soll eine Spannung in einen digitalen Wert
mit einer Auflösung von 3Bit gewandelt werden und das Ergebnis als Balkenanzeige auf den LEDs an Port E ausgeben werden. Die notwendigen Informationen finden sich im ADC-Datenblatt
"Section 17. 10-bit Analog-to-Digital Converter (ADC)" von Microchip.
1#include<p32xxxx.h>// hier wird die µC spezifische Header-Datei eingebunden 2#include<plib.h>// include peripheral library functions 3//Konfigurationseinstellungen 4#pragma config FSOSCEN = OFF // Disable secondary oscillator 5#pragma config POSCMOD = HS // High speed crystal mode 6#pragma config FNOSC = PRIPLL // Use Primary Oscillator with PLL (XT, HS, or EC) 7#pragma config FPLLIDIV = DIV_2 // Divide 8MHz to between 4-5MHz before PLL (now 4MHz) 8#pragma config FPLLMUL=MUL_20 // Multiply with PLL (now 80MHz) 9#pragma config FPLLODIV = DIV_1 // Sysclk = 80MHz10#pragma config FWDTEN = OFF // Disable watchdog timer11#pragma config FPBDIV = DIV_2 // stellt den Peripheral-Clock-Divisor auf 1:2 ein121314#define SYSCLK 80000000L
1516constunsignedchar bargraph[] = {0, 1, 3, 7, 15, 31, 63, 127}; // Array zum Erzeugen der Balkenanzeige1718int main(void)
19 {
20 SYSTEMConfigPerformance(SYSCLK); // für maximale Performence2122 TRISE = 0x00; // Port-E -> Ausgang23 TRISB = 0x08; // Port-B -> Eingang24 LATE = 0x01; // und mit 1 initialisieren2526//AD-Wandler konfigurieren27 AD1CON1bits.FORM = 0b000; // Darstellung als 16Bit unsigned integer28 AD1CON1bits.SSRC = 0b111; // Wandlung automatisch gestartet, wenn Sampling beendet ist29 AD1CON1bits.ASAM = 0; // Sampling startet, wenn SAMP-Bit gesetzt wurde (AD1CON1bits.SAMP)3031 AD1CON2bits.VCFG = 0b000; // Spannungsreferenz ist AVDD und AVSS32 AD1CON2bits.OFFCAL = 0; // Offset-Kalibration ausschalten33 AD1CON2bits.CSCNA = 0; // Eingänge nicht scannen34 AD1CON2bits.BUFM = 0;
35 AD1CON2bits.ALTS = 0; // immer MUX A nutzen36 AD1CON2bits.SMPI = 0b0000; // Ergebnis wird immer in ADC1BUF0 geschrieben3738 AD1CON3bits.ADRC = 0; // PB-Clock wird als Taktquelle verwendet39 AD1CON3bits.SAMC = 0b1000; // 8*T_AD40 AD1CON3bits.ADCS = 0; // T_AD = 2* T_PB -> ergibt 1000ksps4142 AD1PCFG = 0x00; // alle Pins von PortB sind analog4344 AD1CHSbits.CH0NB = 0; // negativer Wandlereingang auf VR-45 AD1CHSbits.CH0SB = 0b0000; // positiver Wandlereingang auf AN0 == RB046// Kanal A wird im Beispiel nicht verwendet und deshalb auch nicht konfigueriert4748 AD1CON1bits.ON = 1; // ADC einschalten4950unsignedchar x = 0;
515253while(1)
54 {
55 AD1CON1bits.SAMP=1; // Wandlung starten56while(AD1CON1bits.DONE!=1); // wartet auf das Ende der Wandlung57 x = (unsignedchar)(ADC1BUF0 >> 7); // Auflösung auf 3Bit beschränken -> 2^3=8 Zustände58// LEDs als Bargraphanzeige verwenden59 LATE = bargraph[x];
60 }
61return 1;
62 }
SPI
Viele ICs, die den Funktionsumfang von µC erweitern, verwenden zur Kommunikation SPI.
Beispiele hier für sind externe Speicherbausteine (z.B. SRAMs und EEPROMs) oder AD- bzw. DA-Wandler-ICs.
Die PIC32-Familie kann bei der Kommunikation sowohl die Rolle des Masters, als auch die des Slaves einnehmen.
In den folgenden Beispielen, will ich zwei mögliche Master-Betriebsarten des SPI-Moduls zeigen.
Die notwendigen Informationen finden sich wieder im entsprechenden Datenblatt: "Section 23. Serial Peripheral Interface (SPI)”
Das erste Beispiel ist ein einfaches "Hello World!"-Programm. Es sendet im Mastermode einen String über den Datenausgang des SPI-Moduls.
1#include<p32xxxx.h>// hier wird die µC spezifische Header-Datei eingebunden 2#include<plib.h>// include peripheral library functions 3//Konfigurationseinstellungen 4#pragma config FSOSCEN = OFF // Disable secondary oscillator 5#pragma config POSCMOD = HS // High speed crystal mode 6#pragma config FNOSC = PRIPLL // Use Primary Oscillator with PLL (XT, HS, or EC) 7#pragma config FPLLIDIV = DIV_2 // Divide 8MHz to between 4-5MHz before PLL (now 4MHz) 8#pragma config FPLLMUL=MUL_20 // Multiply with PLL (now 80MHz) 9#pragma config FPLLODIV = DIV_1 // Sysclk = 80MHz10#pragma config FWDTEN = OFF // Disable watchdog timer11#pragma config FPBDIV = DIV_1 // stellt den Peripheral-Clock-Divisor auf 1:1 ein121314#define SYSCLK 80000000L
1516void config_timer(void)
17 {
18 T1CON = 0x00; // hält Timer1 an und setzt setzt alle Einstellungen zurück -> PBCLK als Taktquelle19 T1CONbits.TCKPS = 0b11; // Timer1 Vorteiler auf 1:256 eingestellt20 TMR1 = 0x00; // Timer1-Register auf Startwert setzen -> Überlauf nach ca. 200ms21 PR1 = 0xFFFF; // Period-Register laden22return;
23 }
2425void wait(void)
26 {
27 T1CONbits.ON = 1; // startet Timer128while(IFS0bits.T1IF!=1); // pollen des Timer-Interruptflags -> zeigt an wenn Timer1 überläuft29 T1CONbits.ON = 0; // nach Überlauf -> Timer1 anhalten...30 IFS0bits.T1IF = 0; // ...und Interruptflag zurück setzen31 TMR1 = 0x00; // Startwert für den nächsten Durchlauf wieder laden32return;
33 }
3435int main(void)
36 {
37 SYSTEMConfigPerformance(SYSCLK); // für maximale Performence38 TRISDbits.TRISD0 = 1; // RD0 -> Eingang3940 SPI3CON = 0x34; // Betriebsmodus konfigurieren41 SPI3BRG = 63; // SPI-Clock-Frequenz42 SPI3CONbits.ON = 1; // SPI3 einschalten43unsignedchar data[] = {"Hello World!"};
44int i = 0;
4546while(1)
47 {
48while(PORTDbits.RD0==0); // warten auf Tastendruck49for(i=0;data[i]!='\0';i++) // String über SPI3 senden50 {
51 SPI3BUF = data[i]; // String Zeichen für Zeichen in den Buffer schreiben52while(SPI3STATbits.SPIBUSY); // warten bis SPI bereit für nächste Übertragung ist53 }
54 SPI3BUF = '';
55 wait(); // Taste entprellen56 }
57return 1;
58 }
Das Ergebnis mit einem Logikanalyser betrachtet sieht so aus:
Auch das zweite Beispiel sendet im Mastermode einen String "Hello World!" über den Datenausgang des SPI-Moduls.
Diesmal ist allerdings zusätzlich der Frame-Pulse aktiviert. In diesem Modus werden auf einem Ausgangs-Pin synchron zur
Übertragung kurze High-Impulse ausgegeben. Deren Abstand und Länge kann unterschiedlich konfiguriert werden. Auch Low-Impulse sind einstellbar.
Über diese Frame-Impulse lassen sich ICs mit einem Latch-Pin ansteuern (z.B. Schieberegister, DAC, etc.). Dafür wurde nur der Konfigurationswerte im SPI3CON-Register geändert.
1/* 2 * File: main.c 3 * Author: Sven 4 * 5 * Created on 12. Februar 2013, 18:04 6 */ 7 8#include<p32xxxx.h>// include chip specific header file 9#include<plib.h>// include peripheral library functions10//Konfigurationseinstellungen11#pragma config FSOSCEN = OFF // Disable secondary oscillator12#pragma config POSCMOD = HS // High speed crystal mode13#pragma config FNOSC = PRIPLL // Use Primary Oscillator with PLL (XT, HS, or EC)14#pragma config FPLLIDIV = DIV_2 // Divide 8MHz to between 4-5MHz before PLL (now 4MHz)15#pragma config FPLLMUL=MUL_20 // Multiply with PLL (now 80MHz)16#pragma config FPLLODIV = DIV_1 // Sysclk = 80MHz17#pragma config FWDTEN = OFF // Disable watchdog timer18#pragma config FPBDIV = DIV_1 // stellt den Peripheral-Clock-Divisor auf 1:8 ein1920#define SYSCLK 80000000L
2122void config_timer(void)
23 {
24 T1CON = 0x00; // hält Timer1 an und setzt setzt alle Einstellungen zurück -> PBCLK als Taktquelle25 T1CONbits.TCKPS = 0b11; // Timer1 Vorteiler auf 1:256 eingestellt26 TMR1 = 0x00; // Timer1-Register auf Startwert setzen -> Überlauf nach ca. 200ms27 PR1 = 0xFFFF; // Period-Register laden28return;
29 }
3031void wait(void)
32 {
33 T1CONbits.ON = 1; // startet Timer134while(IFS0bits.T1IF!=1); // pollen des Timer-Interruptflags -> zeigt an wenn Timer1 überläuft35 T1CONbits.ON = 0; // nach Überlauf -> Timer1 anhalten...36 IFS0bits.T1IF = 0; // ...und Interruptflag zurück setzen37 TMR1 = 0x00; // Startwert für den nächsten Durchlauf wieder laden38return;
39 }
4041int main(void)
42 {
43 SYSTEMConfigPerformance(SYSCLK); // für maximale Performence44 TRISDbits.TRISD0 = 1; // RD0 -> Eingang4546 SPI3CON = 0x58000034; // Master-Mode mit Frame-Pulse47 SPI3BRG = 63; // SPI-Clock-Frequenz48 SPI3CONbits.ON = 1;
49unsignedchar data[] = {"Hello World!"};
50int i = 0;
5152while(1)
53 {
54 i=0;
55while(PORTDbits.RD0==0); // warten auf Tastendruck56for(i=0;data[i]!='\0';i++) // String über SPI3 senden57 {
58 SPI3BUF = data[i]; // in den Buffer schreiben59while(SPI3STATbits.SPIBUSY); // warten bis SPI bereit für nächste Übertragung ist60 }
61 SPI3BUF = '';
62 wait(); // Taste entprellen63 }
64return 1;
65 }
Hier wieder das Ergebnis mit einem Logikanalyser betrachtet:
I2C
Eine weitere gängige Schnittstelle für die Kommunikation von µC mit anderen Bausteinen ist der I2C-Bus.
Als Beispiel für die Verwendung des I2C-Busses soll im folgenden Programm ein 4x20-LC-Display angesteuert werden. Solche Displays findet man bei diversen Online-Shops im Programm.
Meist sind es gewöhnliche LCDs mit Parallelschnittstelle, die mittels eines µCs oder eines Port-Expanders I2C-tauglich gemacht wurden. Das im Beispiel verwendete Display besitzt auf
der Rückseite eine kleine Adapterplatine. Auf dieser sitzt ein Port-Expander vom Typ PCF8574, dessen Adresse fest auf 0x27 eingestellt ist.
Da der Port-Expander nur über acht I/O-Pins verfügt, muss das Display im 4-Bit-Modus angesteuert werden (vgl. www.sprut.de).
Das Display wird mit +5V betrieben. Dies ist auch der High-Pegel, der an den SCL- und SDA-Leitungen des Port-Expanders anliegt. Dies stellt für unseren µC allerdings kein Problem dar, da die verwendeten Pins (SCL4 und SDA4)
5V-tolerant sind. Welche Pins +5V vertragen und welche nur +3,3V, lässt sich im Datenblatt nachlesen. Auch lässt sich das Display, obwohl +5V angegeben werden, problemlos mit +3,3V versorgen.
Pinbelegung zwischen dem LCD und dem Port-Expander:
PCF8574
I/O 0
I/O 1
I/O 2
I/O 3
I/O 4
I/O 5
I/O 6
I/O 7
LCD
RS
RW
EN
Backlight
D4
D5
D6
D7
Die maximale Taktfrequenz, mit der der Port-Expander Daten über den I2C-Bus empfangen kann, beträgt 100kHz. Im ersten Programm wird testweise "Hello World!" auf dem Display ausgegeben.
...Code...
Als nächstes sollen einige Funktionen geschrieben werden, um die Handhabung des Displays innerhalb eines Programms zu erleichtern. Analog zu den Konsolenausgaben in C, soll es eine Funktion void printLCD() für Strings
und eine Funktion void putcLCD(char) für einzelne Zeichen geben. Außerdem noch eine Funktion void init_LCD(void), um das Display zu initialisieren. Um die Programmteile zum Ansprechen des LCDs in zukünftigen Programmen besser wiederverwenden
zukönnen, sollen zwei Header-Dateien erstellt werden. Eine delay.h mit Funktionen für Warteschleifen und eine LCD.h zum ansprechen von LCDs.
 Rocking Wombat
Rocking Wombat